無人機檢測
作者:百檢網(wǎng) 時間:2021-09-15 來源:互聯(lián)網(wǎng)
無人機檢測去哪里做?百檢網(wǎng)實驗室可對各類無人機進行檢測,出具第三方無人機檢測報告。
樣品類型
工業(yè)無人機,家用無人機,無人機太陽能板,軍用無人機,無人機靶機,固定翼無人機、植保無人機、多翼無人機等。
檢測內(nèi)容
質(zhì)量檢測,性能檢測,動平衡試驗,續(xù)航檢測,防水檢測,防塵檢測、續(xù)航時間,防雨,展開時間,防火,*大起飛重量,*大任務(wù)載重,高溫工作,抗風(fēng)能力,溫度沖擊。
無人機發(fā)動機測試( 抗霉菌試驗,高溫高濕可靠性,淋雨試驗,鹽霧試驗,貯存試驗,太陽輻射試驗。)
其他檢測項目
基礎(chǔ)飛行性能、抗風(fēng)性、維修性、聲隱性、自主飛行、安全性、高海拔性能、環(huán)境適應(yīng)性、電磁兼容性、可靠性等。
*大水平飛行速度檢驗
讓無人機正常運行,升至10米高度,記錄此時控制器上顯示的距離S1;
無人機以*大速度水平飛行10s,記錄此時控制器上顯示的距離S2;
按照公式計算*大水平飛行速度。
V=(S2-S1)/10 公式中:
V:*大水平飛行速度,單位為米每秒(m/s);
S1:控制器上顯示的初始距離,單位為米(m);
S2:控制器上顯示的*終距離,單位為米(m)。
*大飛行高度檢驗
讓無人機正常運行,升至10米高度,記錄此時控制器上顯示的高度H1,然后無人機以*大爬升速度持續(xù)向上爬升至*大飛行高度,記錄此時控制器上顯示的高度H2,按照公式計算*大飛行高度。
H=H2-H1 公式中:
H:無人機*大飛行高度,單位為米(m);
H1: 控制器上顯示的初始飛行高度,單位為米(m);
H2: 控制器上顯示的*終飛行高度,單位為米(m)。
*大續(xù)航時間檢驗
使用充滿電的電池進行試驗,將無人機升至5米高度并懸停,使用秒表開始計時,無人機自動下降時停止計時。記錄的時間即為*大續(xù)航時間。
飛行半徑檢驗
記錄控制器上顯示的指無人機從發(fā)射到返航的飛行距離,飛行半徑為控制器上記錄的飛行距離除以2。
飛行軌跡檢驗
在地面畫一個直徑2m的圓;將無人機從圓點處升空至10米處懸停,持續(xù)15min。
監(jiān)測在懸停過程中無人機垂直投影位置是否超出此圓。
如果垂直投影位置沒有超出此圓,則水平航跡控制精度≤1m;
將無人機升至50米高后懸停10min,記錄懸停過程中控制器上顯示的*大高度與*小高度值,這兩個高度減去開始懸停時的高度的值即為垂直航跡控制精度。垂直航跡控制精度應(yīng)<10m
遙控距離測試
即在電腦上查看無人機飛至距離操作者指定的距離,能通過電腦應(yīng)能夠?qū)o人機進行飛行控制。
抗風(fēng)能力測試
不小于6級風(fēng)能夠正常起降、飛行。
定位精度測試
無人機定位精度取決于技術(shù),不同的無人機所能達到的精度范圍會有所不同。根據(jù)傳感器的工作狀態(tài)和產(chǎn)品標(biāo)注的精度范圍進行測試。
垂直: *m(視覺定位正常工作時); *m(GPS正常工作時)
水平: *m(視覺定位正常工作時); *m(GPS正常工作時)
絕緣電阻檢驗
參考GB16796-2009條款5.4.4.1規(guī)定的試驗方法,電源開關(guān)接通的情況下,在電源引入端與外殼裸露金屬部件之間,施加500 V直流電壓穩(wěn)定5s后,立即測量絕緣電阻。
如外殼無導(dǎo)電件,則設(shè)備的外殼包一層金屬導(dǎo)體,測量金屬導(dǎo)體與電源引入端之間的絕緣電阻。絕緣電阻測量值應(yīng)≥5MΩ。
抗電強度檢驗
參考GB16796-2009條款5.4.3規(guī)定的試驗方法,電源引入端與外殼裸露金屬部件之間應(yīng)能承受標(biāo)準(zhǔn)中表1規(guī)定的交流電壓的抗電強度試驗,歷時1min,應(yīng)無擊穿和飛弧現(xiàn)象。
抗熱能力檢驗
參考GB16796-2009條款5.6.2.1規(guī)定的試驗方法,在正常工作條件下,工作4h后用點溫度計或任何合適的方法測量表面溫度。
可觸及零部件的溫升不應(yīng)超過GB8898-2011表2中正常工作條件下的規(guī)定值。
低溫檢驗
根據(jù)GB/T 2423.1-2008規(guī)定的試驗方法,將無人機放入環(huán)境試驗箱中,溫度(-252)℃,試驗時間16h。
試驗結(jié)束后在標(biāo)準(zhǔn)大氣條件下恢復(fù)2h,無人機應(yīng)能正常工作。
振動檢驗
根據(jù)GB/T2423.10-2008規(guī)定的試驗方法,無人機在非工作狀態(tài),無包裝;
頻率范圍:10Hz~150Hz;
交越頻率:60Hz;
f<60Hz,恒定振幅 0.075mm ;
f>60Hz, 恒定加速度9.8m/s2 (1g);
單點控制; 每軸掃描周期數(shù)l0;
試驗在無人機底面上進行,試驗時間15min。
試驗結(jié)束后無人機應(yīng)無明顯外觀損傷,并能夠正常工作。
可靠性測試
首次故障前工作時間≥2h,允許進行多次重復(fù)試驗,每次試驗時間不低于15min。
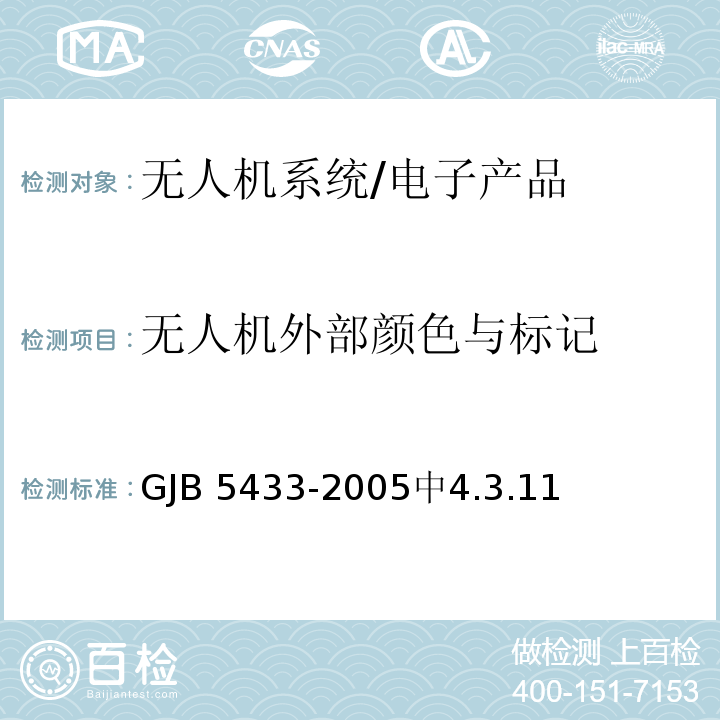
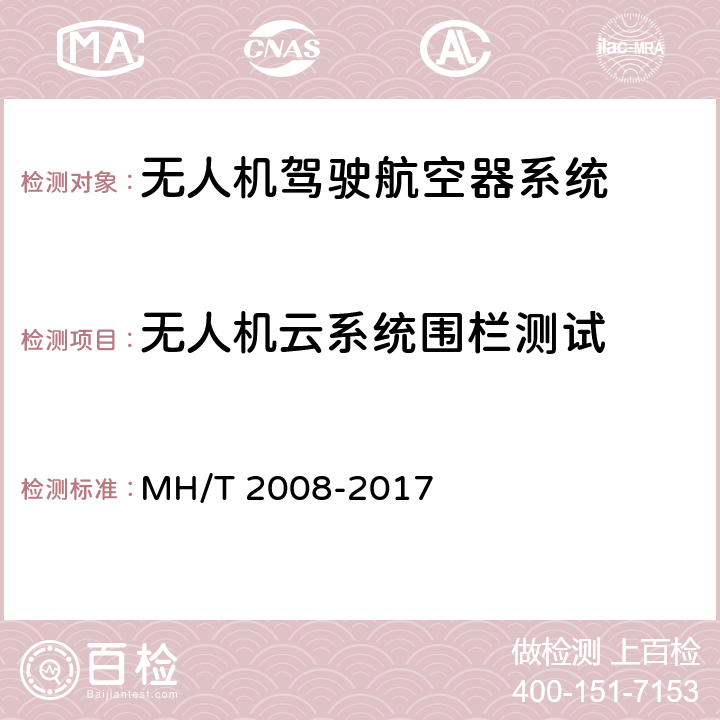
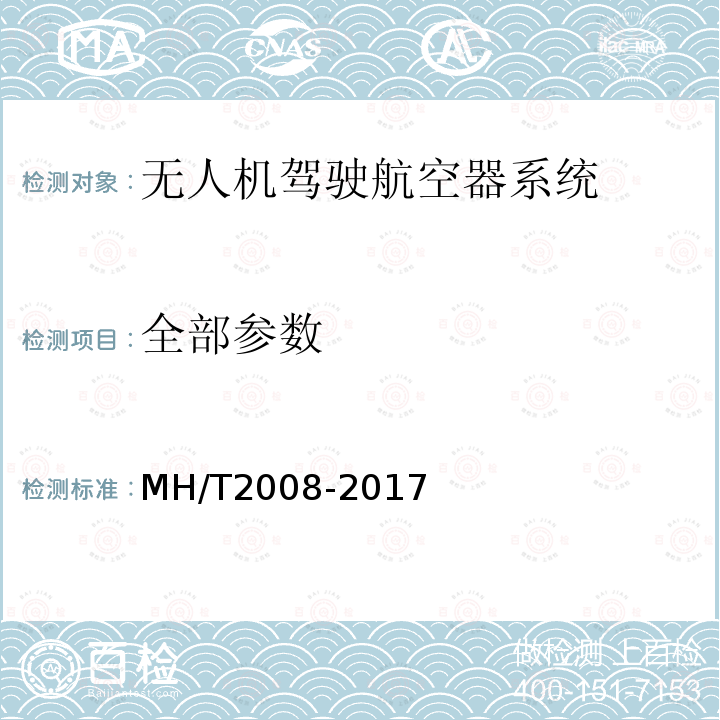
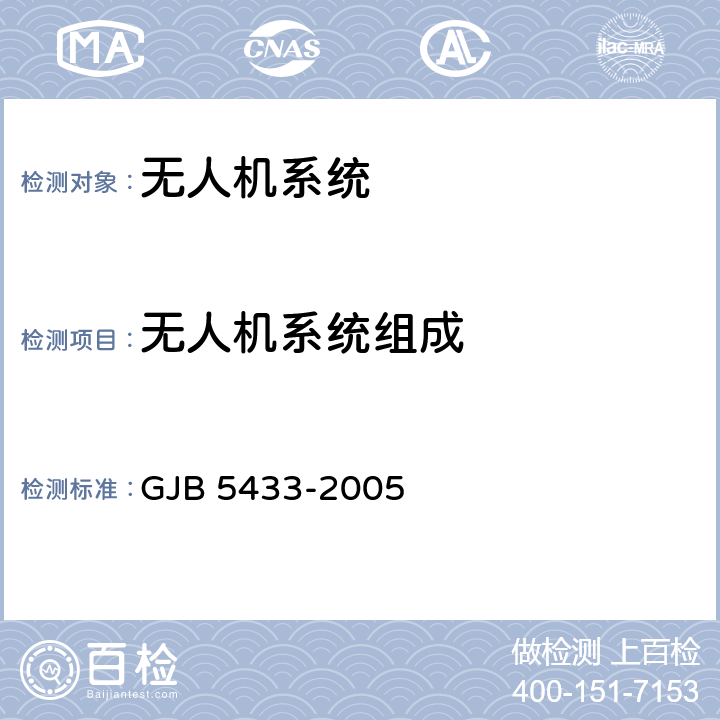
相關(guān)標(biāo)準(zhǔn)
1GB/T 38058-2019民用多旋翼無人機系統(tǒng)試驗方法
25T/SZUAVIA 003-2017多軸無人機系統(tǒng)通用技術(shù)要求
26T/SZUAVIA 004-2017公共安全無人機系統(tǒng)通用要求
27T/SZUAVIA 005-2017消防用多旋翼無人機系統(tǒng)技術(shù)要求
28T/SZUAVIA 007-2017固定翼無人機系統(tǒng)技術(shù)要求
百檢能給您帶來哪些改變?
1、檢測行業(yè)全覆蓋,滿足不同的檢測;
2、實驗室全覆蓋,就近分配本地化檢測;
3、工程師一對一服務(wù),讓檢測更精準(zhǔn);
4、免費初檢,初檢不收取檢測費用;
5、自助下單 快遞免費上門取樣;
6、周期短,費用低,服務(wù)周到;
7、擁有CMA、CNAS、CAL等權(quán)威資質(zhì);
8、檢測報告權(quán)威有效、中國通用;
客戶案例展示










相關(guān)商品


相關(guān)資訊

行業(yè)熱點







版權(quán)與免責(zé)聲明
①本網(wǎng)注名來源于“互聯(lián)網(wǎng)”的所有作品,版權(quán)歸原作者或者來源機構(gòu)所有,如果有涉及作品內(nèi)容、版權(quán)等問題,請在作品發(fā)表之日起一個月內(nèi)與本網(wǎng)聯(lián)系,聯(lián)系郵箱service@baijiantest.com,否則視為默認百檢網(wǎng)有權(quán)進行轉(zhuǎn)載。
②本網(wǎng)注名來源于“百檢網(wǎng)”的所有作品,版權(quán)歸百檢網(wǎng)所有,未經(jīng)本網(wǎng)授權(quán)不得轉(zhuǎn)載、摘編或利用其它方式使用。想要轉(zhuǎn)載本網(wǎng)作品,請聯(lián)系:service@baijiantest.com。已獲本網(wǎng)授權(quán)的作品,應(yīng)在授權(quán)范圍內(nèi)使用,并注明"來源:百檢網(wǎng)"。違者本網(wǎng)將追究相關(guān)法律責(zé)任。
③本網(wǎng)所載作品僅代表作者獨立觀點,不代表百檢立場,用戶需作出獨立判斷,如有異議或投訴,請聯(lián)系service@baijiantest.com
關(guān)于我們 萬檢(上海)信息科技有限公司(簡稱:百檢網(wǎng))是國內(nèi)知名B2B檢測電商服務(wù)平臺,專注于為第三方 檢測機構(gòu)以及中小微企業(yè)及個人用戶搭建互聯(lián)網(wǎng)+檢測電商服務(wù)平臺。平臺匯集了國內(nèi)外權(quán)威檢測機構(gòu)(CNAS/CMA),其中不乏國家級、省級重點實驗室以及國際知名檢測機構(gòu),為廣大用戶提供一站式檢測服務(wù)。
客服熱線 400-101-7153 專屬服務(wù):156 0190 2607 企業(yè)郵箱:Service@Baijiantest.Com 聯(lián)系地址:上海市徐匯區(qū)宜山路700號

微信公眾號

官方微博
百檢集團
滬ICP備19010749號經(jīng)營許可證編號:滬B2-20190666Copyright@2019www.szlhsb.comAll Rights Reserved

- 微信客服
- 電話咨詢
- QQ客服

 返回頂部
返回頂部

 400-101-7153
400-101-7153 15201733840
15201733840